Инженеры показали, как сделать квадрокоптеры быстрее и экономичнее, — добавить наклон пропеллеров
Традиционные дроны для движения в горизонтальном направлении производят небольшой наклон вперёд, но это увеличивает площадь их лобовой проекции, а с ней и сопротивление. Инженеры Калифорнийского университета в Беркли предложили (PDF) простую, но эффективную замену этому механизму, которая не требует дополнительных энергозатрат.
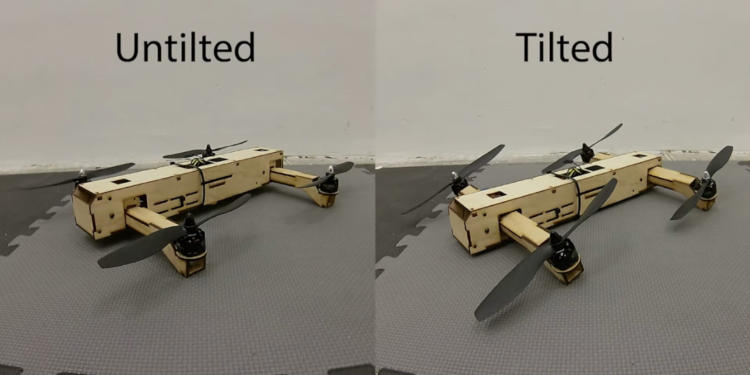
Источник изображения: youtube.com
Разработанная в Калифорнии конструкция дрона нового образца получила название QUaRTM (QUadcopter with an unactuated Rotor Tilting Mechanism) или «квадрокоптер с бесприводным механизмом наклона ротора». Конструкция включает в себя прямоугольный корпус с четырьмя стрелами, на конце каждой из которых размещён ротор. Стрелы не закрепляются на корпусе неподвижно, а соединяются с ним шарнирами и пружинами.
Если тяга от роторов невелика, пружины удерживают их на одной линии с корпусом. Когда же тяга достигает определённого значения, лопасти винтов преодолевают усилие, оказываемое пружинами, и стрелы производят наклон на угол до 20°. В результате дрон двигается вперёд, сохраняя горизонтальное положение корпуса, при котором аэродинамическое сопротивление минимально. Что важнее, пружинная конструкция не требует установки дополнительных приводов — всю работу проделывает тяга, которая создаётся роторами.
В ходе испытательных полётов QUaRTM поднимался в воздух с заблокированным и разблокированным механизмом наклона. Авторы проекта установили, что при разблокированном механизме максимальная скорость дрона оказывается на 12,5 % выше, повышается манёвренность — максимальная «безаварийная крейсерская скорость» увеличивается на 7,5 %, — а энергопотребление при диапазоне скоростей от 15 до 20 м/с снижается более чем на 20 %.