Робот-паркурщик Salto научился маневрировать в воздухе
В декабре 2016 года мы писали о роботе-паркурщике Salto, который способен передвигаться, подпрыгивая на внушительную для своего роста высоту. И вот, спустя полгода после выхода, специалисты из Biomimetic Millisystems Lab Калифорнийского университета провели ряд модификаций, позволивших роботу управлять своим движением во время прыжка.
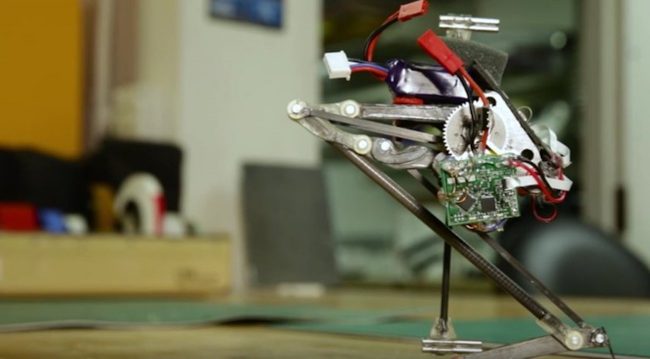
Усовершенствованный вариант робота получил название Salto-1P. А управление траекторией движения во время полета стало возможным благодаря установке ряда аэродинамических компонентов. Их наличие позволяет роботу совершать даже достаточно сложные трюки. На Salto-1P установлено 2 винта с пропеллерами, которые и позволяют роботу изменять траекторию во время прыжка. Помимо этого, появился и своего рода «хвост» — стержень с двумя противовесами, соединенный с электродвигателем.
Благодаря всему вышеперечисленному, Salto-1P может не только точно приземляться после прыжка, но и совершать последующий прыжок, как бы кувыркаясь. Кроме этого, благодаря ряду усовершенствований, Salto-1P может прыгать на высоту 1,25 метра, что на целый метр превышает рекорд предыдущей версии. Скорость прыжка при этом изменилась не так сильно и составляет 1,83 метра в секунду.
Наличие всех озвученных характеристик дало возможность ученым говорить о практическом применении. Это, в первую очередь, поисково-спасательные операции и разнообразные разведывательные миссии. Больше подробностей разработчики обещают раскрыть в рамках международной конференции IEEE/RSJ 2017, которая пройдет в конце июля в Канаде.